SISTEM PENERIMA TELEMETRI RF
Sebuah sistem penerima menerima data melalui pembawa termodulasi ditransmisikan. Ini demodulates telemetri carrier, catatan, dan / atau relay data. Data harus diterima menjadi kesetiaan yang sangat tinggi dan sedekat mungkin dengan replika langsung (bebas kesalahan) dari data yang ditransmisikan. yang ditransmisikan operator dapat berada dalam kendaraan yang bergerak atau stasioner. Sebuah kendaraan bergerak dapat menyajikan empat masalah yang mungkin untuk memperoleh data yang berkualitas:
a. Kendaraan dan sistem tracking dinamika
c. Data degradasi karena efek bulu-bulu pada sumber transmisi
d. efek multipath
Transmitted pembawa dari kendaraan stasioner dapat disajikan dengan efek dari butir b dan / atau butir d di atas.
Antenna Subsystem
Sistem tracking Telemetri biasanya menggunakan parabola antena / reflektor. Tujuannya adalah untuk reflektor untuk mencegat sebanyak energi mungkin dalam "lobus utama," tapi beberapa energi tumpah tepi menciptakan tingkat lobus samping. Lobus samping dapat digambarkan sebagai terbuang atau tingkat daya yang tidak diinginkan yang benar-benar bisa mengganggu tracking otomatis.
Pemilihan reflectoris diatur oleh persyaratan telemetri, seperti yang diinginkan gain, kinerja sisi lobus, dinamika sistem, dan biaya. Antena juga harus ukuran, seperti besar praktis, untuk memenuhi persyaratan ponsel atau site-tetap Masalah utama dengan antena reflektor adalah mendapatkan hubungan yang baik antara umpan tracking dan reflektor . Ketika umpan defocused sepanjang sumbu simetri , yang Kondisi ini dikenal sebagai kuadrat atau "square-law " kesalahan fase . Parameter yang terkena dampak gain antena dan lobus tingkat amplitudo sisi pertama . Kesalahan fasa dapat menyebabkan nulls antara bagian lobus dan main beam yang hilang . main beam tampak seperti roll- off dan pertama amplitudo bagian lobus tidak lagi berbeda. Bila umpan reflektor paraboloidal adalah berpindah dari titik fokus dan off-axis , main beam bergerak dalam arah yang berlawanan . ini menghasilkan keuntungan yang lebih rendah dan tingkat bagian lobus yang lebih tinggi . Akhirnya mendapatkan kinerja tracking yang rendah.
Antenna-Feed Assembly Subsystem ( AFAS )
a . Tujuan



Antenna-Feed Assembly Subsystem ( AFAS )
a . Tujuan
Tujuan dari AFAS ada dua. Tujuan
utama adalah untuk menerima Sinyal RF dari gelombang ruang dicegat yang berada
dalam bandwidth RF yang dirancang dari elemen antena . Tujuan kedua adalah
untuk menghasilkan sinyal kesalahan yang menghasilkan torsi ( saat ini) dengan azimuth dan elevasi motor kendaraan yang memutar
antena memungkinkan untuk mengikuti sumber carrier frequency secara otomatis jika
bergerak di ruang angkasa.
Unit AFAS harus berada di titik fokus
reflektor parabola khasuntuk memaksimalkan tingkat sinyal yang diterima whileminimizing kesalahan
tracking . itu tracking kesalahan pada antena boresight , atau pusat RF , harus menunjukkan
rendah ( jika ada) jumlah dari azimuth atau elevasi ( Az / El ) crosstalk .
Lobus sisi pertama harus 16 sampai 22 dB turun dari lobus utama untuk
meningkatkan elevasi rendah , tracking otomatis dan meminimalkan gangguan.
Ada
tiga jenis dasar umpan tracking perakitan subsistem . Salah satunya adalah saluran tunggal monopulse ( SCM ) . The SCM adalah umpan scan dioda -switching dirancang untuk menghasilkan kesalahan tracking . Yang kedua adalah umpan
memindai kerucut ( CSF ) . Seperti namanya , kerucut , yang berasal dari angguk
kepala (atau " goyangan " )
Efek dari bagian yang
bergerak ( biasanya antena tanduk ) , digunakan untuk menghasilkan tracking kesalahan
. Jenis ketiga adalah umpan elektronik dipindai . kombinasi ini merupakan fitur
terbaikdari SCM dan CSF untuk menghasilkan kesalahan tracking . Aplikasi dan
biaya pertimbangan akan mengatur proses seleksi .
b. f / D Ratio.
Terlepas dari jenis
umpan yang digunakan, faktor yang sangat penting untuk dipertimbangkan adalah
rasio f / D. Parameter ini adalah fungsi dari panjang fokus dan dimensi
aperture (Gambar 4-1). Umpan harus berada pada titik fokus sepanjang sumbu
simetri. Di lokasi ini, Anda mengoptimalkan gain antena dan memiliki baik
pertunjukan sisi lobus. Artinya, puncak lobus sisi pertama dioptimalkan. Mereka
terletak beberapa dBs bawah puncak balok utama. Sebuah amplitudo puncak lobus
sisi pertama pada 18 dB di bawah puncak balok utama dianggap sebagai ukuran
yang baik. Semakin rendah puncak lobus sisi pertama, semakin baik kinerja
antena.
Desain terbaru dari
majelis pakan telah menunjukkan sisi tingkat puncak lobus khas pada 21 dB di
bawah sinar lobus utama. Juga , lokasi yang tepat dari perakitan pakan pada
titik fokus akan menghasilkan mendalam , nulls tajam antara lobus sisi pertama
dan lobus utama. Mengoptimalkan parameter ini juga akan meminimalkan efek dari
transmisi multipath.
Seorang pengguna
rentang memutuskan ukuran antena yang dia butuhkan. Antena dapat digunakan
untuk melacak satelit , pesawat, rudal , helikopter , dll Jika sistem akan
digunakan untuk melacak semua hal di atas , optimasi direkomendasikan harus
untuk melacak kendaraan dinamis tinggi , seperti rudal .
Penentuan rasio f / D
sekarang menjadi lebih kritis . Rasio ini merupakan hubungan antara modulasi
kesalahan tracking dan gradien tracking kesalahan . Modulasi tracking kesalahan
harus cukup tinggi untuk memungkinkan kesalahan - tracking gradien linier untuk
band RF ( s ) di mana sistem akan beroperasi . Mengoptimalkan parameter ini
akan mengurangi crosstalk antara azimuth dan elevasi tracking kesalahan .
Mengoptimalkan gradien kesalahan tracking melibatkan kelengkungan ( kedalaman )
dari reflektor parabola .
f = D2/(16
• d)
dimana:
f = focal length
d = depth of the antenna,
titik fokus adalah fungsi dari kedalaman
dan diameter antena. Kedalaman diukur dari bagian belakang reflektor ke depan
seperti yang ditunjukkan pada Gambar 4-1. Rasio f / D akan menjadi nilai lebih
besar dari nol dan kurang dari 1,0.
Rasio f / D yang
tinggi, semakin tajam kesalahan modulasi tracking. Sebuah rasio f / D 0,5-0,7
harus menghasilkan modulasi tracking dengan crosstalk minimum. Optimasi rasio f
/ D dapat dilihat pada umpan unit perakitan yang menggunakan scanner untuk
switching berkas atau scanning kerucut.
Pola sudut antena
sekunder dipindai, ketika diplot bersama-sama, akan menunjukkan titik sudut
silang utama. Jika salah satu pola sudut memiliki tingkat gain yang lebih
tinggi dari yang lain, gain antena keseluruhan akan menurun dan sistem akan
menunjukkan crosstalk dalam gradien error linier tracking. Semua parameter
harus dioptimalkan bersama-sama, yang merupakan tugas yang sulit, tetapi bukan
tidak mungkin,. Setelah dioptimalkan, selisihnya harus ditempelkan ke reflektor
dan umpan asembly ditahan untuk memungkinkan penghapusan umpan dan dirakit pada
titik fokus yang sama. Ini juga akan menjaga umpan menjadi miring atau juga menyebar.

Gambar 1. Pengukuran yang digunakan
untuk menghitung rasio f/D
c. Single Channel monopulse (SCM).
Jenis tracking umpan perakitan terdiri
dari penjumlah saluran (Σ) dan selisih (Δ) saluran. Penjumlah Saluran juga
dikenal sebagai saluran data untuk menerima frekuensi pembawa (termodulasi atau
unmodulated). Selisih (Δ) Saluran menghasilkan sinyal (dikenal sebagai sinyal
error tracking) untuk tracking otomatis. Antena dipol biasanya digunakan dan
sesuai untuk pita frekuensi (s) ditugaskan untuk telemetri. Jika pita frekuensi
yang sangat luas, sehingga mencakup lebih dari satu band, mulai 1400 MHz sampai
2400 MHz, menjadi sulit untuk menyetel antena dipol. Hasil akhirnya menyebabkan
crosstalk yang tidak diinginkan, gain yang lebih rendah, rasio aksial yang
lebih tinggi, dan mungkin penurunan linearitas gradien error tracking.
Jumlah saluran antena
dipol biasanya dalam sebuah konfigurasi dipol bersilang seperti yang
diilustrasikan pada Gambar 2. Dipol bersilang ortogonal satu sama lain dan
dirujuk sebagai vertikal dan horizontal. Perbedaan channel Antena dipol juga
dalam sebuah konfigurasi dipol bersilang, dan terletak di sekitar penjumlah channel
antena dipole dengan beberapa isolasi untuk meminimalkan crosstalk antena. Penjumlah
Saluran menerima level sinyal maksimum ketika itu benar boresighted karena
terletak pada titik fokus. Posisi ini sesuai dengan dimana perbedaan saluran menghasilkan
kesalahan minimum tracking. Penjumlah Saluran AM amplitudo-modulated dengan
perbedaan sinyal saluran yang mewakili jumlah kesalahan dalam azimuth dan
elevasi dari boresight.

Ganbar 2. Saluran tunggal monopulse
antena dipol
kesalahan Sinyal tracking
yang dihasilkan oleh perbedaan saluran akhirnya akan dikonversi menjadi arus (
torsi ) untuk memutar azimuth dan elevasi servomotors dan reposisi antena
kembali ke pusat boresight . Perbedaan Saluran paling tepat digambarkan sebagai
kesalahan fase yang berasal dari membandingkan kedatangan sinyal pada dua
antena dipol . Sebuah gerakan horizontal antena atau sumber akan menghasilkan
kesalahan azimuth , sementara gerakan vertikal akan menghasilkan error elevasi
.
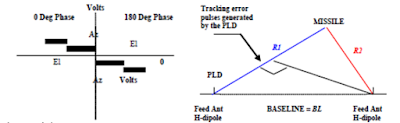
Gambar 3 mengilustrasikan
kesalahan tracking yang dihasilkan oleh antena dipole horizontal dan vertikal
dalam umpan unit perakitan. Sebuah kesalahan yang dihasilkan dari selisih fase
antara dua antena spasi " x " panjang gelombang terpisah . Semakin
jauh antena dari pusat boresight , semakin besar kesalahan .
Sinyal error menggunakan sinyal
pemindaian yang disinkronisasi dapat beroperasi dari frekuensi rendah ( Hz )
sampai frekuensi tinggi ( kHz ) . Tingkat scan yang rendah biasanya lebih besar
daripada tingkat spin kendaraan diharapkan dapat mencegah menghasilkan
kesalahan karena berputar kendaraan . Tingkat scanning beroperasi dalam modus
tetap atau menyapu . Modus tetap biasanya digunakan untuk memantau pulsa
kesalahan saat mode menyapu dianjurkan untuk melacak karena meminimalkan efek
multipath . Sinyal scanning menyinkronkan kesalahan tracking dikembangkan
antara modulator pemindaian di AFAS dan demodulator tracking kesalahan (
Tracking Error Demodulator TED ) . The TED memisahkan kesalahan azimuth dari
kesalahan elevasi .

Gambar 3. Error Tracking yang dihasilkan oleh antena dipole
Semakin jauh pulsa error Az / El berasal
dari titik acuan, semakin besar kesalahan. Perhatikan bahwa fase 0 derajat sama
dengan "mirror image" pada 180 derajat.
PLD:
Panjang perbedaan jalur; menghasilkan
kesalahan yang mewakili seberapa banyak koreksi yang dibutuhkan untuk memutar
antena kembali ke pusat boresight; dinyatakan dalam kelipatan panjang gelombang
yang merupakan pecahan dari panjang gelombang dan sama dengan r1 – r2
c/
f: Panjang gelombang
BL
: Jarak Baseline antara antena (sekitar 6
inchi)
(1) Pola Antena untuk SCM.
Pola antena sekunder
untuk penjumlah saluran mengikuti sin x / x gelombang. Gambar 4 mengilustrasikan pola antena khas untuk penjumlah saluran (solid line) dan
perbedaan saluran (rusak line). Dalam nulls harus jelas antara lobus utama dan
mengsukseskan sisi lobus jika AFAS adalah pada titik fokus. Keberhasilan
amplitudo sisi lobus harus lebih rendah daripada tingkat sisi-lobus sebelumnya.
Pertama sekali sisi Lobus harus
setidaknya 16 dB turun dari lobus utama.
Pola perbedaan adalah hanya kebalikan
dari pola saluran sum. Sebuah nol jauh di dalam pola perbedaan harus terjadi di
mana-mana bahwa pola saluran sum menunjukkan sinyal maksimum. Perawatan harus diambil
untuk mencegah "side-lobe bahu" di mana tidak ada nol mendalam antara
lobus samping.

Gambar 4. Channel sum khas dan saluran
perbedaan pola (unscaled).
Gambar 4 menunjukkan
batas-batas pola berasal dari-18.0o sampai 18,0 o untuk tujuan memeriksa lobus
utama, dan setidaknya dua tingkat side-lobe pertama. Pola antena dapat
memperpanjang dari-360o sampai 360 o di mana kembali lobus akan jelas, namun
resolusi itu tidak sangat baik.
(2) Kondisi Skew untuk SCM.
Kondisi condong pada unit
asembly umpan adalah contoh dari masalah pentahapan dan mungkin tidak jelas
dengan mata telanjang. Sebuah kondisi miring dapat dinilai melalui pengukuran
pola antena menggunakan sumber boresight. Mengetahui azimuth yang tepat dan
sudut elevasi antara sistem penerima dan sumber boresight dapat membantu
penilaian.
Kondisi condong dapat dievaluasi dengan
melacak sumber radiasi RF (menggunakan mode auto-track) dari yang dikenal, titik
yang disurvei, dan pemantauan keluaran penerima AM atau masukan ke TED. Empat pulsa kesalahan (Az / El) tracking untuk
0o dan 180o harus berupa garis lurus. The auto - track
azimuth dan sudut elevasi antara sistem tracking dan sumber boresight harus
berada dalam jarak 5 persen ( error statis ) dari posisi sudut ke sumber untuk
mendapatkan sinyal maksimum . Jika gerakan antena pada sudut posisi yang benar
adalah lebih besar dari batas linearitas gradient , atau jika kesalahan tracking
menunjukkan dispersi lebar sementara dalam modus auto - track , sistem ini
calon yang baik untuk umpan re-alignment . Hal ini penting untuk memastikan
bahwa spar antena tidak longgar dan menyebabkan Fau condong . Juga , sumber
transmisi harus berada pada jarak untuk analisis medan jauh , yang ditentukan
oleh diameter reflektor penerima .
( 3 ) Error Crosstalk untuk SCM .
Kesalahan crosstalk dalam sebuah sistem "
elevation over azimuth " adalah masalah yang sangat serius yang dapat
mencegah auto - tracking . Crosstalk terjadi ketika Anda menghasilkan error
tracking dalam satu sumbu saja dan sumbu lainnya menunjukkan kesalahan yang
dapat menyebabkan gerakan . Gejala umum adalah gerakan spiral antena karena
upaya untuk memperbaiki kesalahan tracking yang dihasilkan dari kesalahan yang
tidak nyata . Tidak boleh ada indikasi kesalahan crosstalk pada sumbu yang
belum diputar . Batas gradien kesalahan tracking harus bebas dari crosstalk .
Batas ini direferensikan di lebar balok -3 dB dari antena . Kesalahan crosstalk
harus dipantau selama pengujian penerimaan. Penilaian harus mencakup sebagai
berikut :
> Reflektor
parabola harus memiliki rasio set f / D untuk mengoptimalkan kinerja tracking
dengan meningkatkan modulasi tracking kesalahan . Rasio f / D adalah rasio
panjang fokus dibagi dengan diameter ( aperture ) dari antena .
> Kondisi
crosstalk kesalahan sistem harus dievaluasi dengan menggunakan polarisasi
linear dan sumber transmisi polarisasi melingkar .
> Kondisi
kesalahan crosstalk juga harus mencakup verifikasi bahwa multipath bukanlah
sumber atau hasil dari crosstalk .
0 comments:
Post a Comment